
アポロ11号の謎。アームストロング船長が手動操縦で月着陸を行った理由とは?
MENU
花鳥風月の巻~普段の生活のなかの宝物を見つける~ TOP > 地球~銀河~宇宙 > アポロ11号の謎。アームストロング船長が手動操縦で月着陸を行った理由とは?
アポロ11号の謎。アームストロング船長が手動操縦で月着陸を行った理由とは?

・
米国東部時間1969年7月20日午後4時18分、日本時間1969年7月21日午前5時18分、協定世界時7月20日20時17分にアポロ11号の月着陸船イーグルは静の海に着陸しました。
それに先立つこと約7分前、すなわち動力降下を始めて5分を過ぎた頃に、月着陸船はプログラムアラームを発し、月着陸中止かと思われる危機を迎えました。
間もなくこの危機を脱したアームストロング船長は、その後「自動操縦」から「手動操縦」による月着陸に移行しました。
手動操縦に移行した理由として、残された映像や出版された書物には
①着陸予定地点を遥かに過ぎていることに気が付いたため。
②コンピュータが示した着陸地点は岩が多く着陸できないと判断したため。
のいずれか表現がされています。

・
①のようにインプットされていた着陸予定地点を見失うということはあり得そうにないと思われます。
・
であれば②なのか?といえば、着陸地点の事前選定は入念に行われたはずで、行ってみて駄目でしたというのはあり得ないと思います。
・
アポロ10号では月周回軌道上で、11号の月着陸を入念に予行していますし、12号から17号までは自動操縦で着陸予定地点にピンポイントで月着陸が行われいます。(13号は月への飛行途上で機械船の爆発事故が起こり月着陸は行っていない)
・
そこらへんはWikipedia「アポロ11号」には(抜粋)
「降下を開始してしばらくすると、アームストロングとオルドリンは月面上の目標地点を通り過ぎるのが2、3秒早いことに気づき、射程領域(ダウンレンジ)がやや長いようだと地上に報告した。つまり、このままでは着陸目標よりも西に数マイル先の地点に着陸してしまうことを示していた。「イーグル」はあまりにも速く飛びすぎていたのである。その原因は高い質量集中(英語版)にあって宇宙船の軌道が変化したのではないかと考えられた。飛行主任のジーン・クランツは、ドッキングトンネル内の余分な空気圧が原因ではないかと推論した。あるいは、機体の損傷チェック時に行われた「イーグル」の爪先回転飛行が原因となった可能性も考えられた。(抜粋)」
・
自働操縦から手動操縦に切り替えるくだりでは(抜粋)
「アームストロングが再び窓の外に目をやると、コンピュータがはじき出した着陸目標が直径300フィート(91メートル)ほどもあるクレーターのすぐ北と東の巨岩がいくつも転がっている領域にあるのが見えたため、アームストロングは操縦を半自動に切り替えた。」
・
これによれば、「このままでは着陸目標よりも西に数マイル先の地点に着陸してしまう」ことが現場での現象から予想されていたことになります。この現象は、月着陸船のコンピュータでは修正しきれなかったため、結果的に当初の目標地点を飛び越えてしまった、ということでしょうか。
12号以降はこの現象の真の原因が解明されて、月着陸船航行コンピュータのプログラムは改修された、ということになります。
・
しかしながら「コンピュータがはじき出した着陸目標が直径300フィート(91メートル)ほどもあるクレーターのすぐ北と東の巨岩がいくつも転がっている」とも書かれているのはなんとも解せないのです。もしかすると「着陸目標」ではなく、当初の着陸予定地点とは大きく西にズレた「着陸予想地点」が着陸に不適である、と判断したと言いたいのでしょうか。
・
とりあえずこの件についても、解明の糸口が自然と降りてくるまで、まったりと待つことといたします。

・
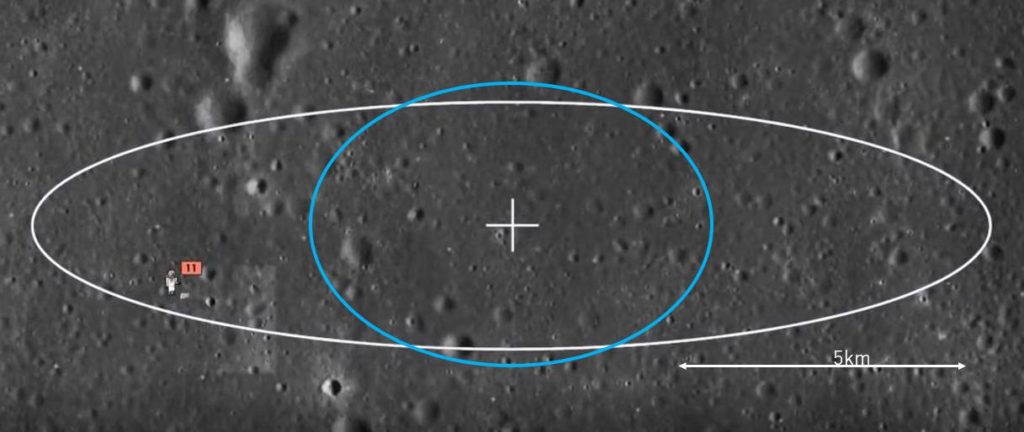
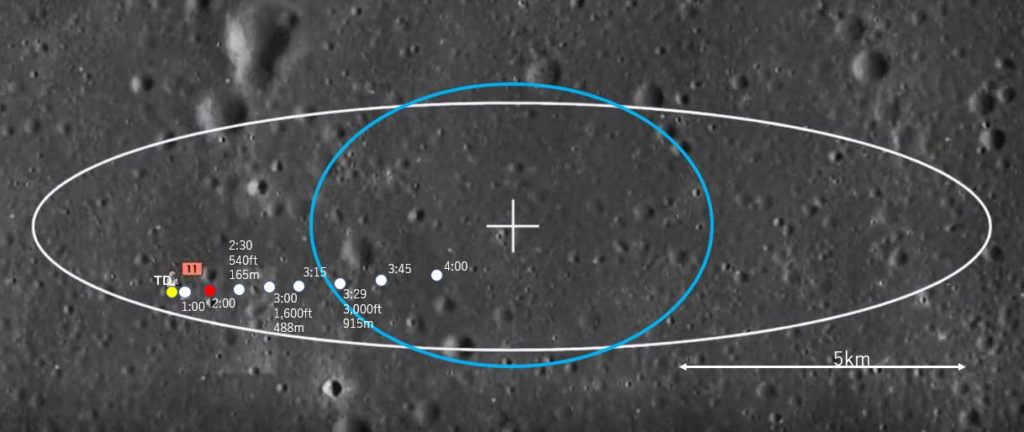
着陸楕円 landing ellipse
月着陸船イーグルは航法コンピュータの誘導プログラムで月面の着陸目標地点に導かれるのですが、慣性誘導装置の誘導誤差によって目標地点からズレた着陸地点に向かって降下していきます。このズレの99.7%を含む地域(正規分布で3σ)をプロットすると楕円状になることから、この地域は着陸楕円(landing ellipse)と呼ばれています。
・
イーグルの当初の着陸楕円は円に近かったのですが(青の楕円)、着陸目標地点に向かって飛行してる間に、月に偏在するマスコン(重力異常)が原因で飛行方向に細長く引き伸ばされた着陸楕円が形成されました(白の楕円)。
・
アームストロング船長は当初の着陸楕円(青の楕円)内の景色が見えるはずが、マスコンにより着陸楕円が飛行方向引き伸ばされたため(白の楕円)、想定外の月面が目の前に現れたので、「プログラムアラームに気を取られていて着陸地点を通り過ぎていた」と認識した、と推測されます。
・
検証してみます
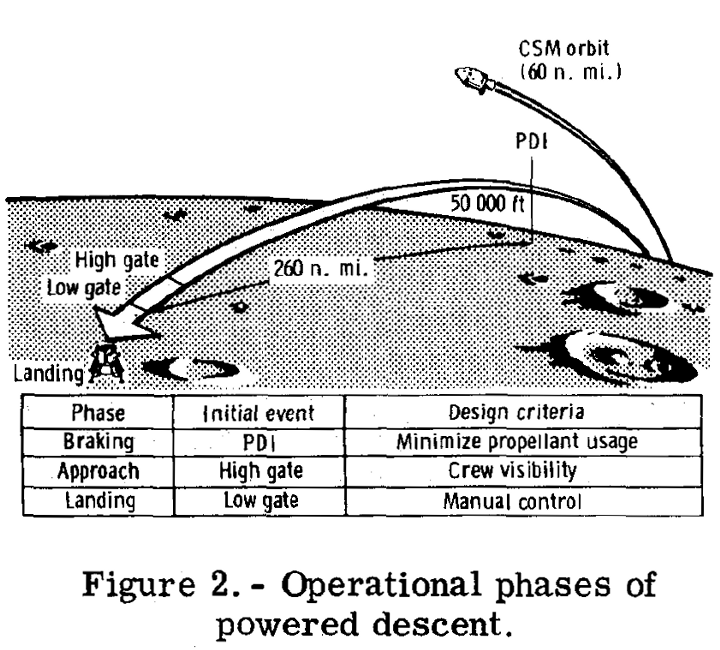
コリンズ司令船操縦士は月周回軌道(高度60マイル(約111.12キロメートル))から、月着陸船の冒険を見守ります。
月着陸船は月面着陸のための逆噴射を開始して動力降下(PDI)を開始します。このときの高度は50,000フィート(15,240メートル)です。
・
動力降下を開始から3つの段階を経て着陸に至るのですが、
第1段階:ブレーキングフェーズ。 ロケットを水平方向に噴射して軌道速度から着陸速度へ減速します
第2段階:アプローチフェーズ。高度7000フィート(2,134メートル)まで降下したら、着陸船を水平から斜め40度~60度に起こし、減速と高度調整を行います
第3段階:ランディングフェーズ。高度は500フィート(153メートル)、着陸地点を見極め、垂直に降下します
・
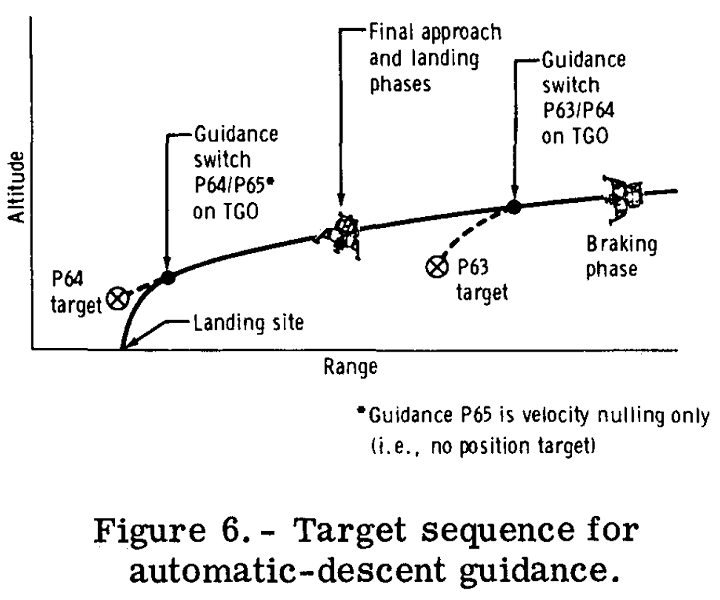
月着陸船に搭載している誘導コンピュータ(LGC)は、それぞれの段階ごとに専用のプログラムが対応します。ブレーキングフェーズを担当するプログラムはP63といいます。P63は着陸船を高度50,000フィート(15,240メートル)から7,000フィート(2,134メートル)の目標点(月面上空)へ導きます。この間着陸船の窓は月面ではなく宇宙空間の方を向いているので月面を確認することができません。月着陸船が目標点に到達すると、自動的に次のプログラムP64が起動します。
・
P64はアプローチフェーズを担当します。アプローチフェーズでは船体が50度程度に引き起こされます。この段階になって初めて宇宙飛行士は着陸予定地点を見ることができるのです。
・
ここから着陸まで4分はかかりません。
・
この一連の流れを再現した動画があります。
・
Apollo 11 The Complete Descent
https://youtu.be/xc1SzgGhMKc
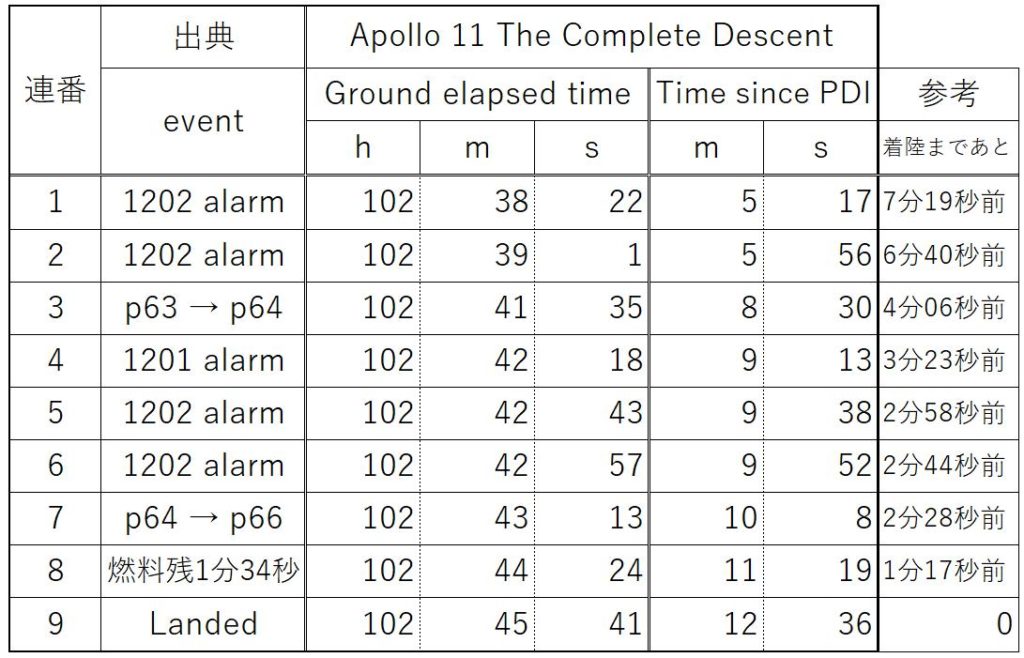
Time since PDI(Powerd Descent Insertion:動力降下の開始)が8分30秒を示したところでP64に切り替わります。(着陸4分6秒前)
Time since PDIが9分13秒のときオルドリンからプログラムアラームの報告が入ります。(着陸3分23秒前)
Time since PDIが10分08秒のときP66に切り替わります。(着陸2分28秒前)
Time since PDIが11分19秒のとき「残燃料1分34秒」がコールされます。(着陸1分17秒前)
残燃料が17秒、Time since PDIが12分36秒で月面に着陸します。
・
P66はアームストロング船長による手動フェーズです。(完全手動ではなく、LGCの助けを借りながら操縦するフェーズです。完全手動はP67です。)
・
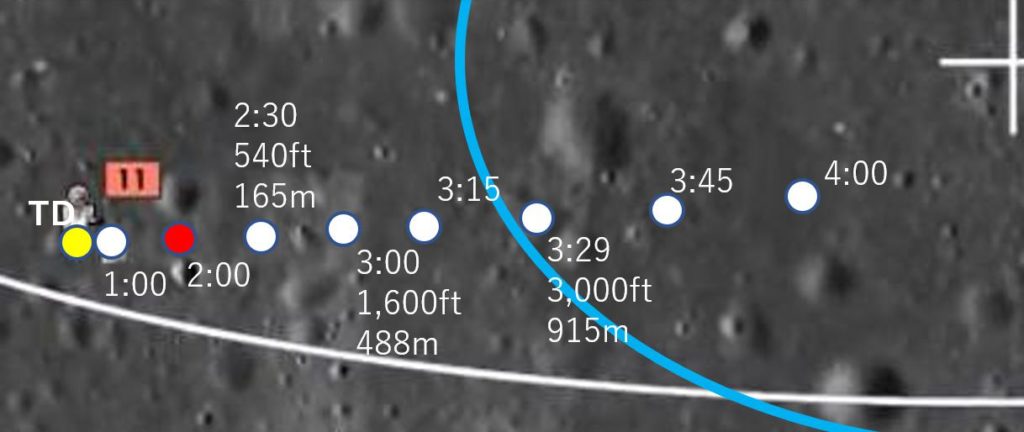
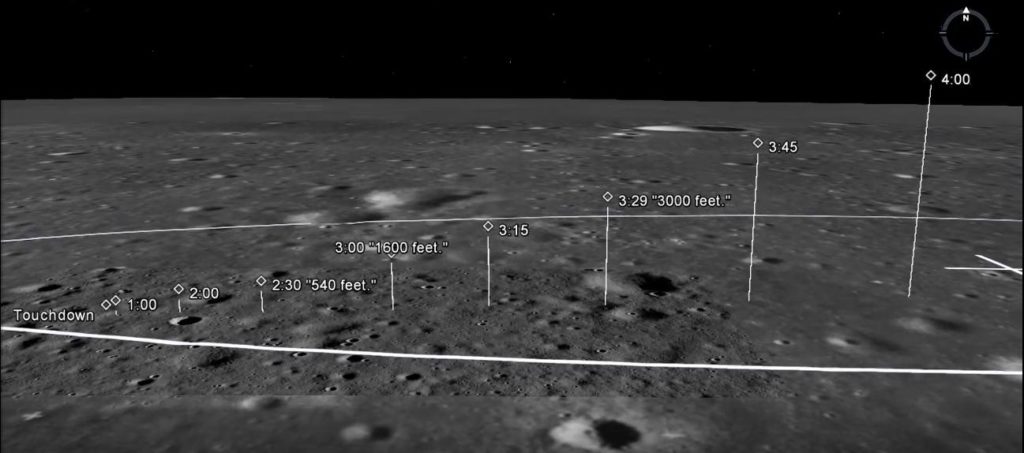
このP64~P66~TD(Touch Down:着陸)を着陸楕円上にプロットすると次の画像になります。なお、赤い点はLGCが示した着陸地点でしたが、アームストロング船長が着陸に不適と判断した場所です。
・
・
・
考察
①月着陸船がアプローチフェーズに入ってときには、既に当初の着陸予定地点の上空を通りすぎていたのです。
これは技術的に避けられない慣性誘導誤差に未知の重力異常の影響が加わり、誤差が増大してしまったためです。
したがって、プログラムアラームに注意を逸らされていたため、当初の着陸予定地点を見過ごした、との解釈は成り立たないと思われます。
・
②コンピュータが示した着陸目標地点は大きな岩が多く着陸に不適と判断したことについて。参考にしたサイトのひとつ「Apollo 11 Landing Profile」の中に、この着陸目標地点(着陸楕円の画像2及び3の中で赤丸でプロットした場所)の拡大画像がでてきますが、確かに大小さまざまな岩が点在して、着陸に不向きに見えました。
・
③アポロ10号ではコンピュータが示した着陸目標地点をキャンセルして次の候補を示す予行を何度か行い、問題ないことを確認しています。
アームストロング船長はコンピュータに次の候補を選択させず、P66(コンピュータに支援を受けた手動操縦)に移行しています。
これは月着陸船が着陸行程の中のどの段階にあるのか理解し、かつ直に月面を見た宇宙飛行士としての決断です。
・・
すなわち、コンピュータでは判断できない未知の領域に入ったため、手動操縦に切り替えて着陸を敢行した、と言えるのです。
・
※参考にしたサイト
■月とコンピュータ
■Lunar Farside Landing Plans
■Apollo 11: The Complete Descent
■Apollo 11 Landing Profile
おまけ
こちらのサイト
■月とコンピュータ
の参考文献として以下の紹介があります。
~~~~~~~~~~~~~~~~~
アポロ着陸船がどのようにして着陸を行ったかを記した論文を、PDFで読むことができます。
■Mission Planning for Lunar Module Descent and Ascent Part1
■Mission Planning for Lunar Module Descent and Ascent Part2
月着陸船のマニュアルもPDFで公開されています。
■ Familiarization Manual (LM10-14)
おまけ2
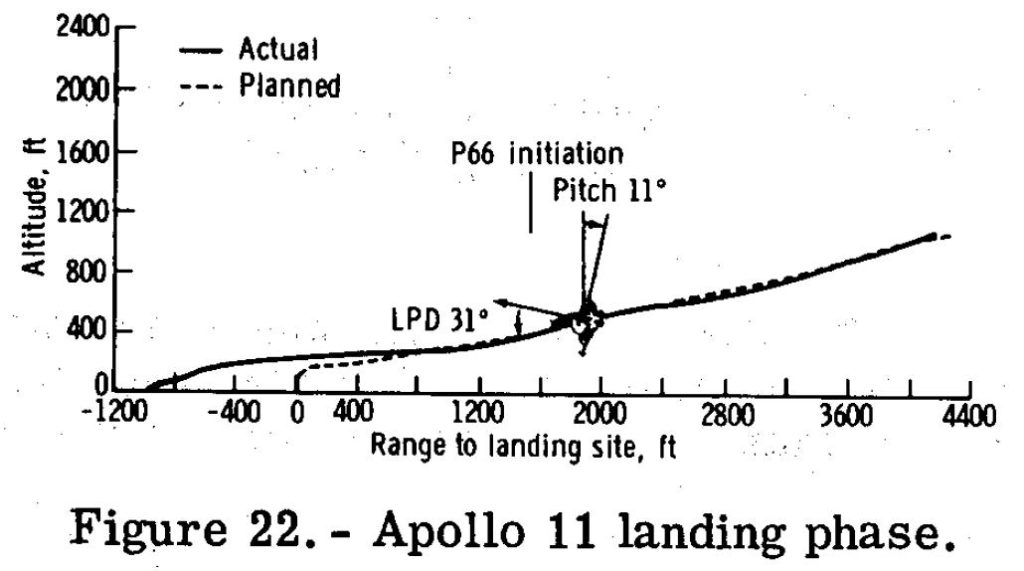
■Mission Planning for Lunar Module Descent and Ascent Part2 を眺めていたら(読んではいない)、面白い図表があったので、切り出して以下に貼ってみます。
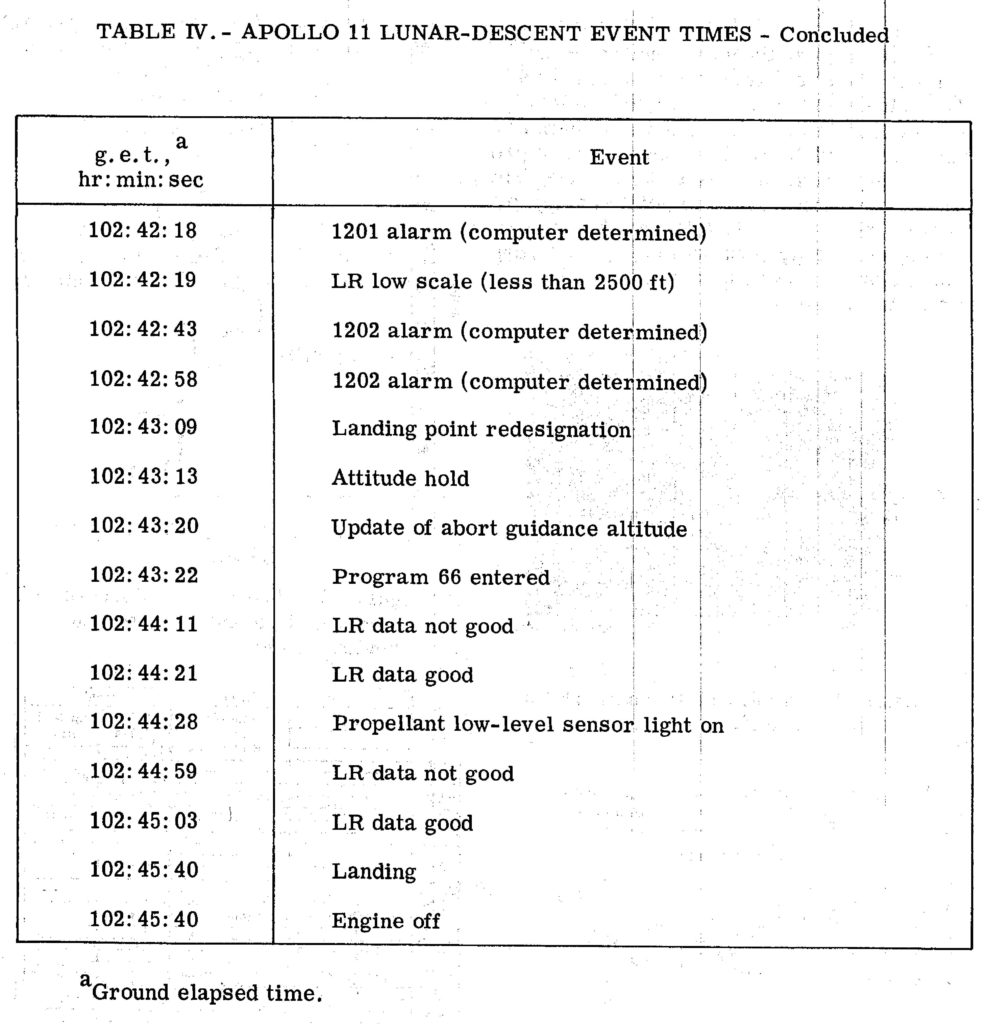
*ところで102:38:22の「1020アラーム」とは?
「Mission Planning for Lunar Module Descent and Ascent Part2」と「Apollo 11 The Complete Descent」のevent timesを比較してみました。
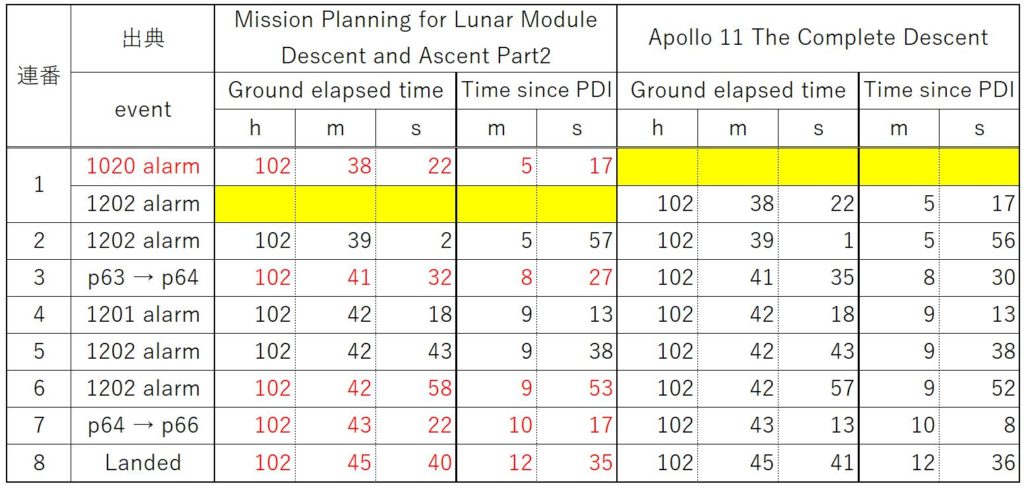
連番1を見ていただくと分かりますが、同時刻に異なるイベントが現れています。「Apollo 11 The Complete Descent」の映像+音声を確認すると明らかに「1202」となっています。したがって「Mission Planning for Lunar Module Descent and Ascent Part2」の「1020 alarm」は、誤記といえるでしょう。
その他のイベントでは微妙に時間がズレているところもありますが、誤差の範囲です。
・
おまけ3
次の動画は映画「From the Earth to the Moon」の月着陸の場面を抜粋したものです。着陸直前の緊迫した様子が劇的に描かれています。そして、着陸後に着陸船内であった様子も(多分)忠実に描かれています。
From the Earth to the Moon (2019): Moon Landing (Clip) | HBO
https://youtu.be/GVAaPy7CMAM

同じカテゴリー「地球~銀河~宇宙」の一覧
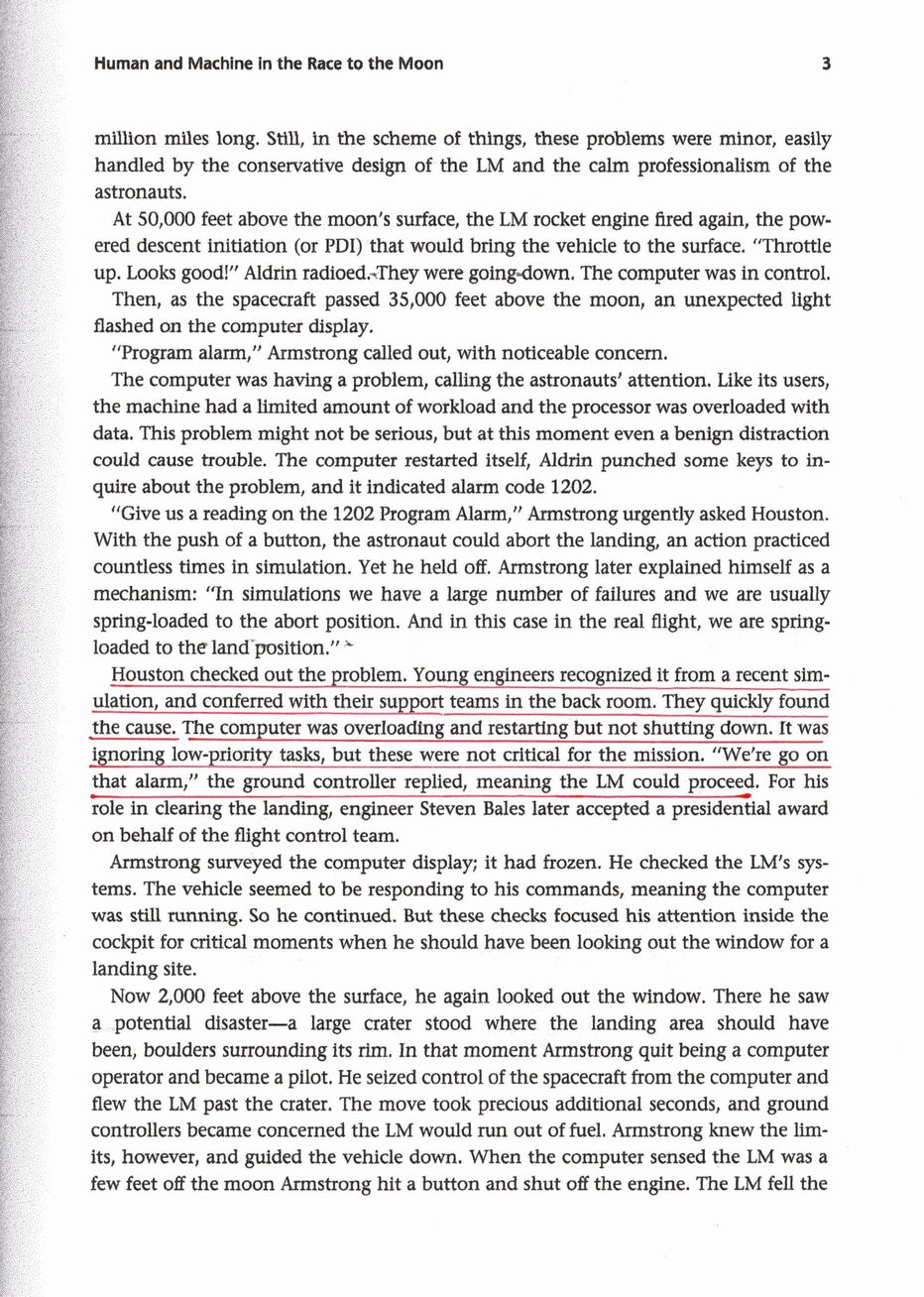
プログラムアラーム1202
アポロ11号の月着陸船内ではプログラムアラーム1202が鳴り響いていました。月面への動力降下を続けていた最中の警告音に、「すわ月着陸は中止か?」とヒューストンの管制室の全員が固唾を飲んだ数十秒間。「問題なし」というバックルームの支援チームから回答を得て、管制官は「月面着陸を続行せよ」と月着陸船のアームストロング船長に伝えました。
天の川銀河中心の超巨大ブラックホール
2022年5月12日に、私たちが所属する天の川銀河の中心にあるとされているブラックホール「いて座A*(いてざエースター)」の撮影に成功したとの発表がありました。

人気記事ランキング
-
 記事の続きを読む
記事の続きを読む「最も成功した失敗」:アポロ13号
アポロ13号は本来の任務は達成できなかったので失敗です。しかし、宇宙飛行士の生命の危機を克服して、月の周回軌道から無事に地球に帰還させたあらゆる行動は、人類の至宝としていつまでも語り継いでいかなくてはならないものだと思います。



記事ランキング


Copyright© 2026 花鳥風月の巻~普段の生活のなかの宝物を見つける~
